Client is one of the leading total solution provider, offering Material Handling System Fastening Solutions, Special Purpose Machines, and Electrical Panel businesses throughout India. From initial Data Analysis Application engineering , Project Planning to complete in house manufacturing, that includes metals, plastics, and software.
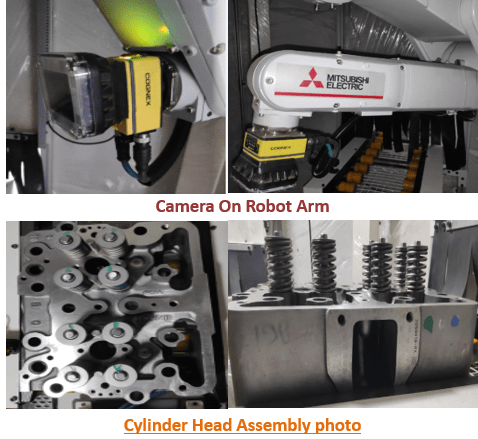
This is to detect Cylinder Head Assembly Manufacturing Defects using vision Camera of 25 job variants has 23 inspection points on each JOB
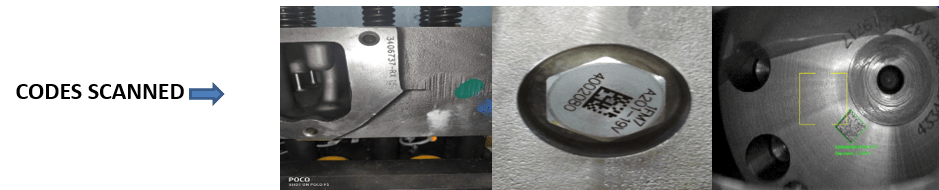
Involves Inspection and detection of proper assembly of their child parts like bolts, Collet Plug, Springs, spring height , Distance between spring turns, QR code, OCR.
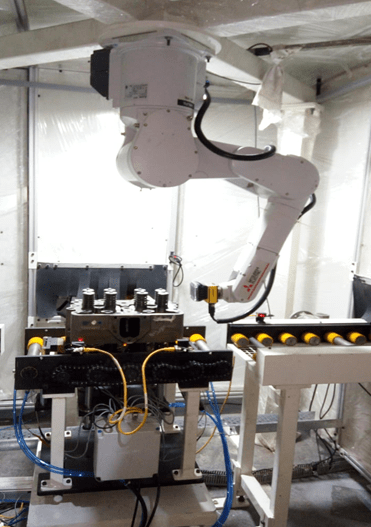
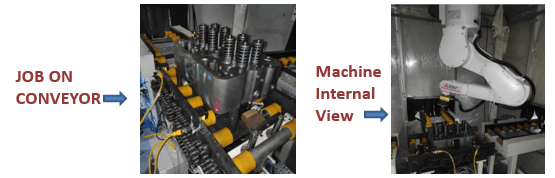
After assembly JOB come from conveyor to inspection area, on start command Robot takes first position ,from first position Camera Captures QR code on JOB and send QR code data to PLC,PLC decodes QR code which contain JOB Sr. No. Each JOB has its unique ID. According to JOB Sr. No. PLC send command to Camera and Robot for program selection. Also give start command to ROBOT for inspection.
Robot takes positions according to selected program. And vision camera captures 23 Images & compare with Master Images stored and result is passed to PLC. OK or not ok.
On results PLC takes action on JOB accept or Reject.
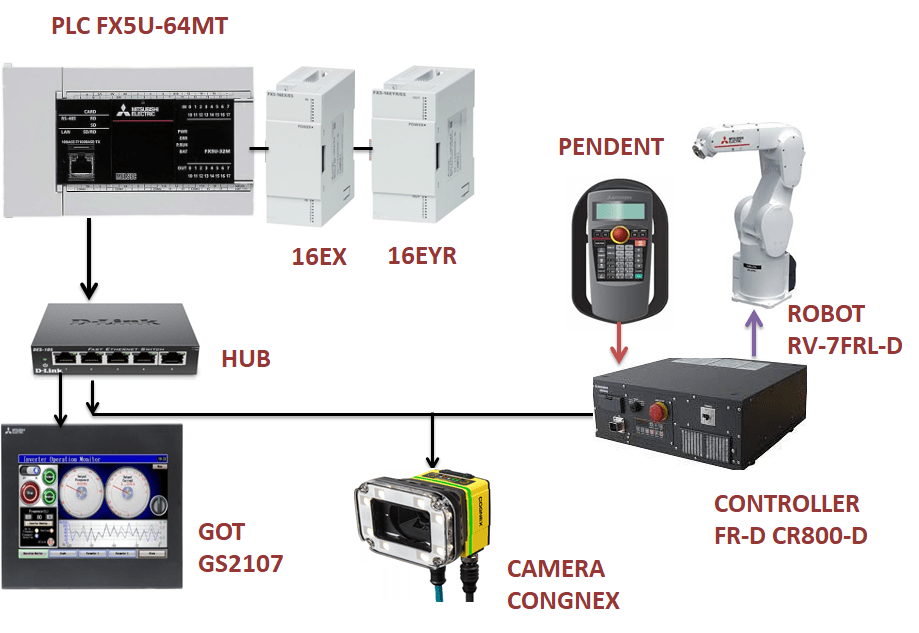
System Layout & HMI
Features
Developed robotic system.
Multi model parts can be scan & inspected by single system.
Overcame all the drawbacks of earlier system (Old System was servo based ).
Multi angle scanning achieved(without rotating job)
Communication of COGNEX using SLMP protocol. SLMP protocol is supported only in FX5U inbuilt Ethernet port